本文转载自第四届中国油气人工智能科技大会合作期刊《钻采工艺》油气人工智能技术专刊作者简介:刘清友(1965—),教授,博士生导师,现任成都理工大学党委书记,本刊编委,主要从事油气装备理论、产品及应用研究工作。
E-mal:liuqy66@aliyun.com
通信作者:赵建国(1988—),博士,副研究员,2019年毕业于西南石油大学机械工程专业,主要从事井下牵引器等钻完井装备及工艺研究。
E-mail:zhaojianguo_1@qq.com
基金项目:国家自然科学基金重大科研仪器研制项目“井下机器人智能钻完井模拟实验系统研制”(编号:52327803);国家自然科学基金面上项目“超长水平井钻井机器人井眼轨迹控制机理研究”(编号:52374006);国家资助博士后研究人员计划项目“超长水平井钻井机器人井地联动协同控制机制研究”(编号:GZC20230331);中国博士后科学基金面上项目“超长水平井钻井机器人井眼 轨 迹 控 制 机 理 研 究 ”(编 号 :2023M730376);四 川 省 科 技 计 划 项 目“ 超 长 水 平 井 钻 井 机 器 人 关 键 技 术 研 发 与 应 用 ”(编 号 :2024YFHZ0155);四川省博士后科研项目特别资助项目“钻井机器人控制机理研究”(编号:10900-23BZ26-02)。
全液压连续油管牵引器工作机理研究
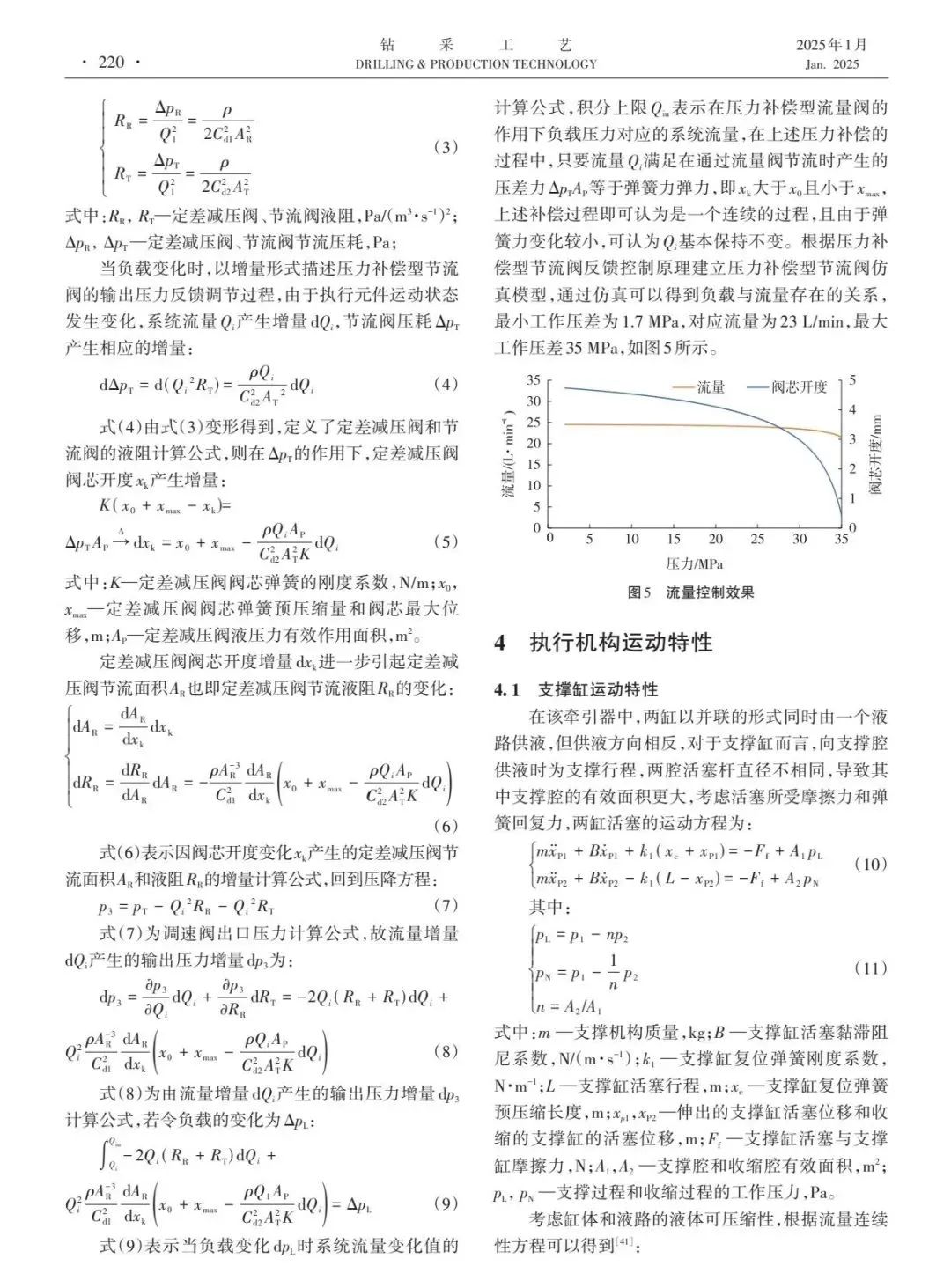
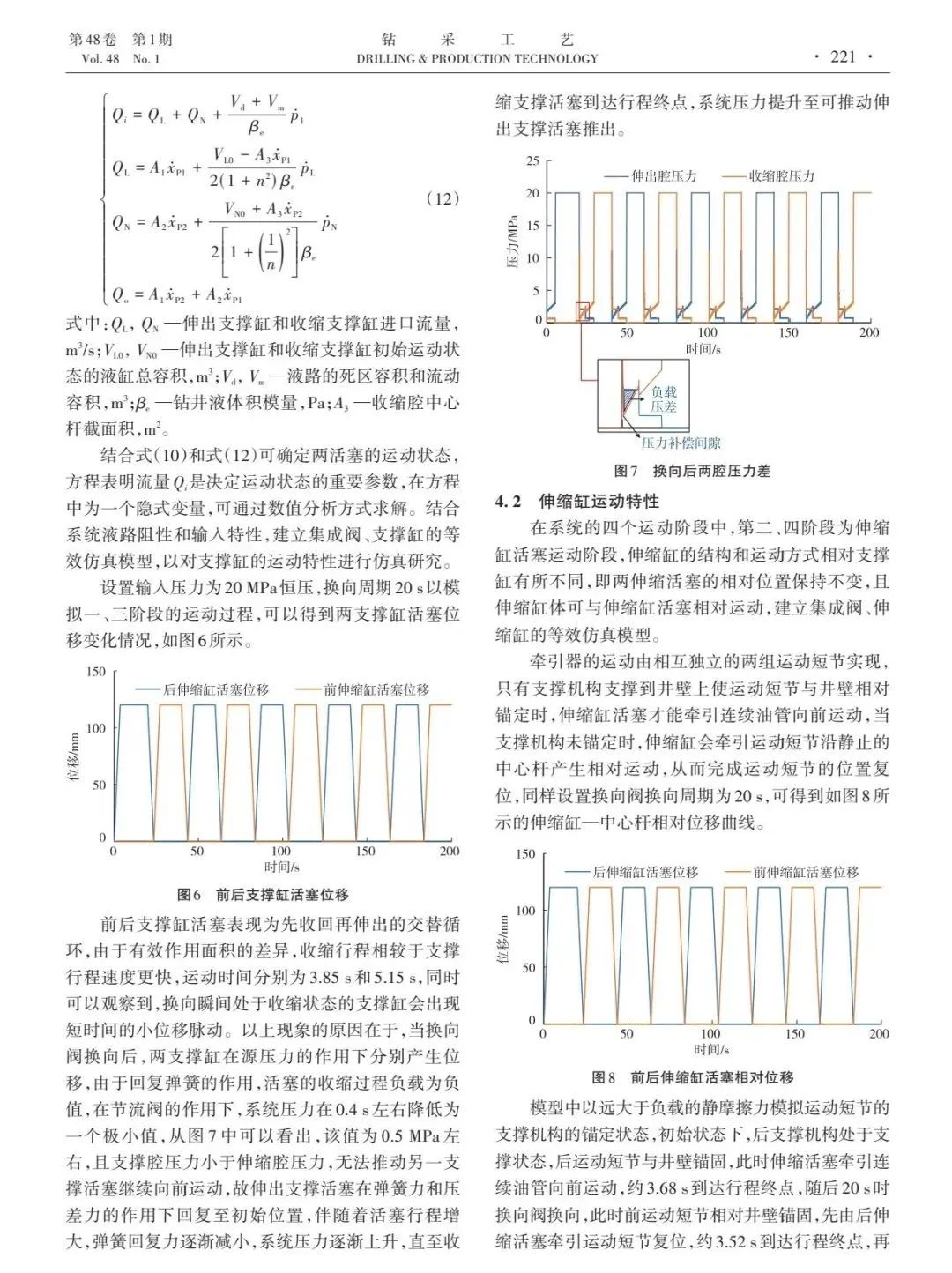
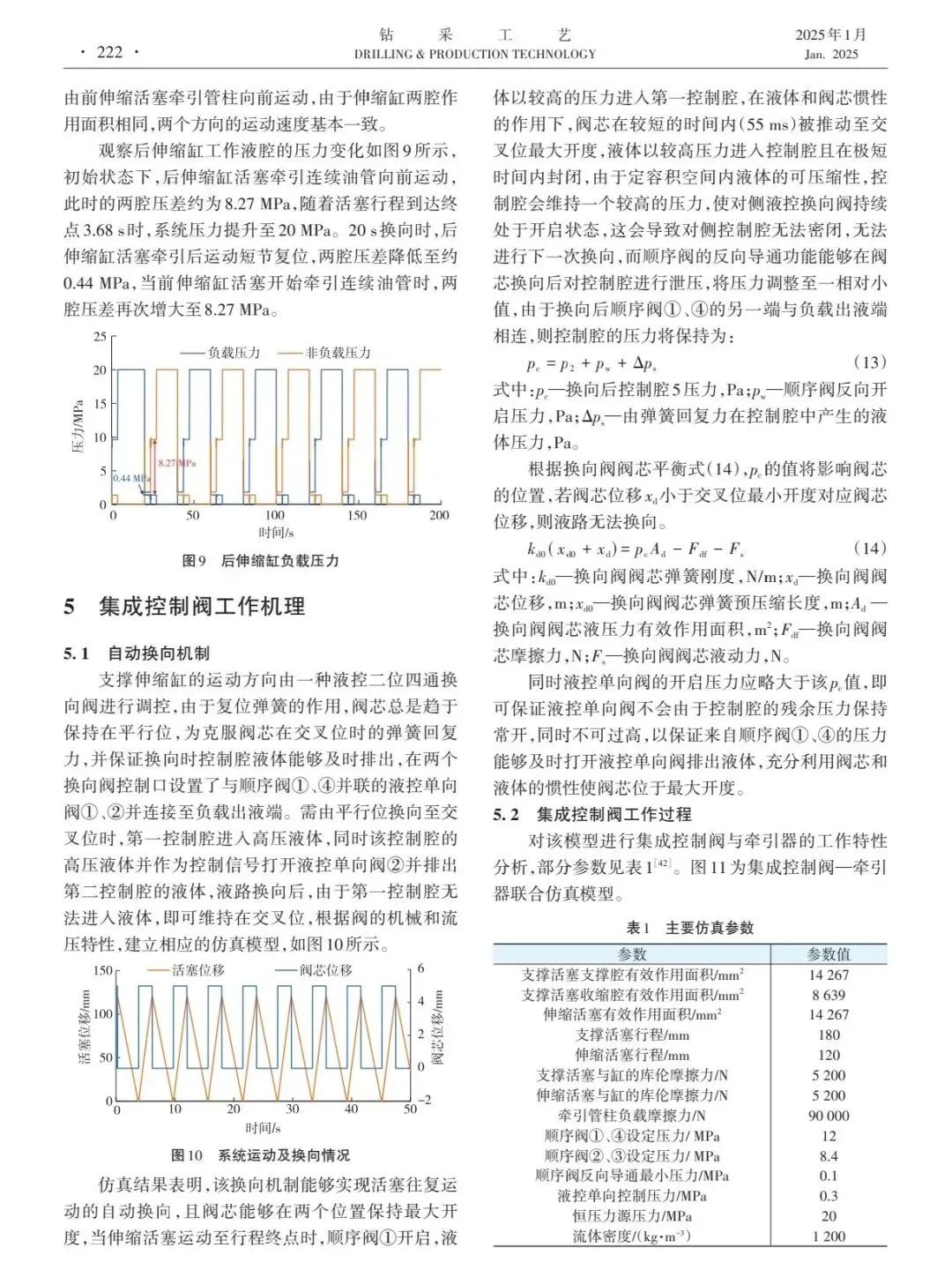
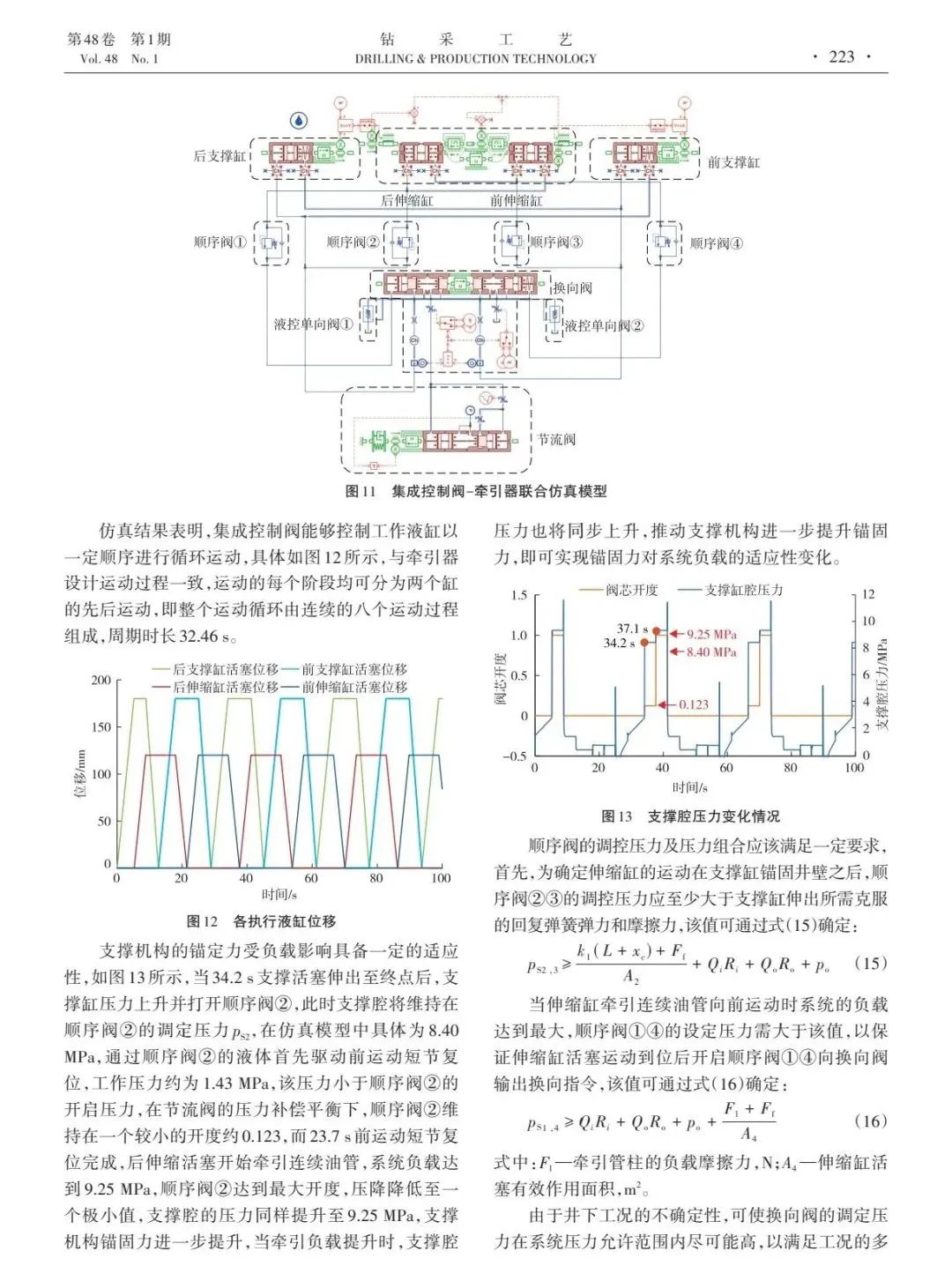
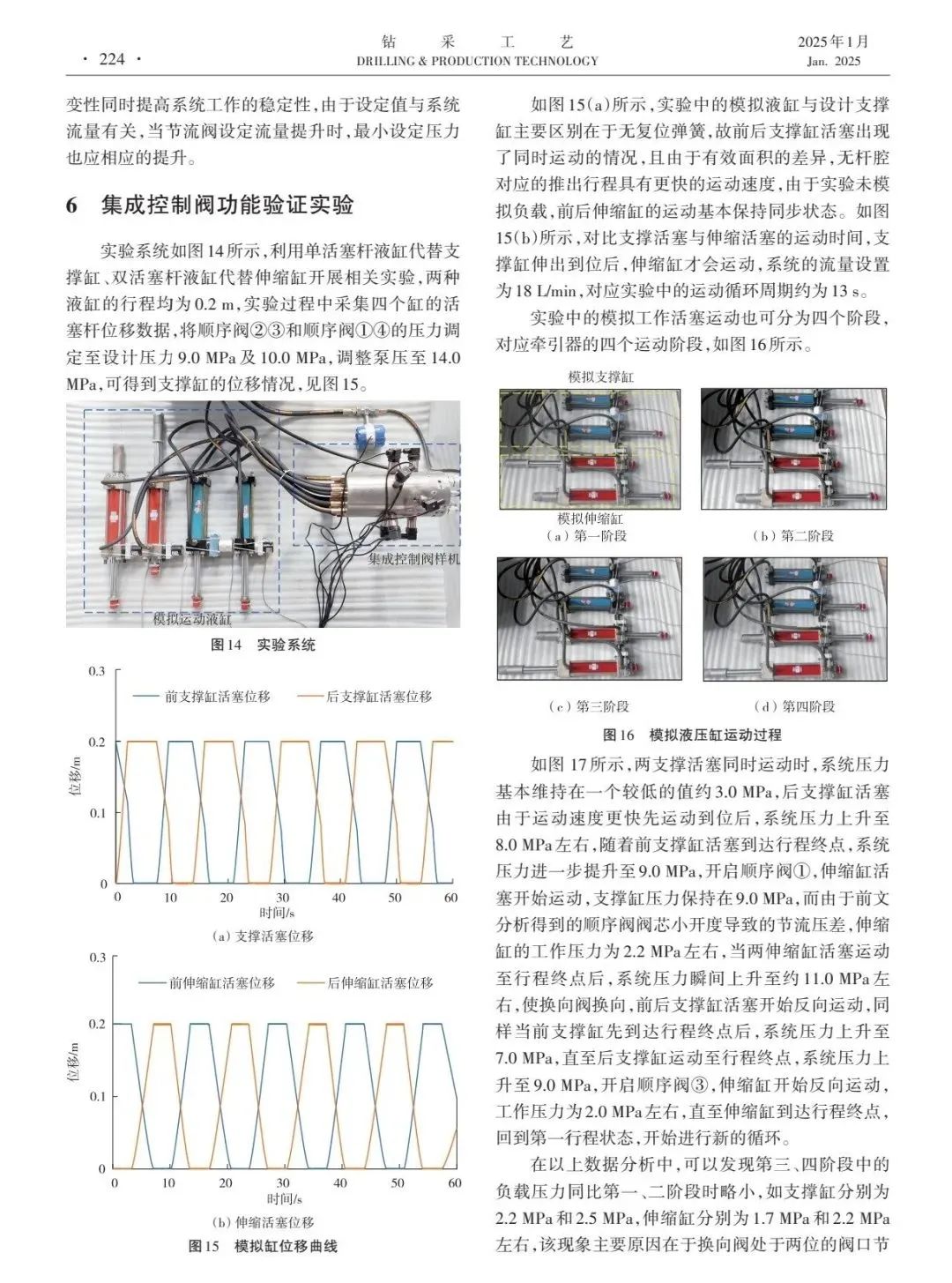
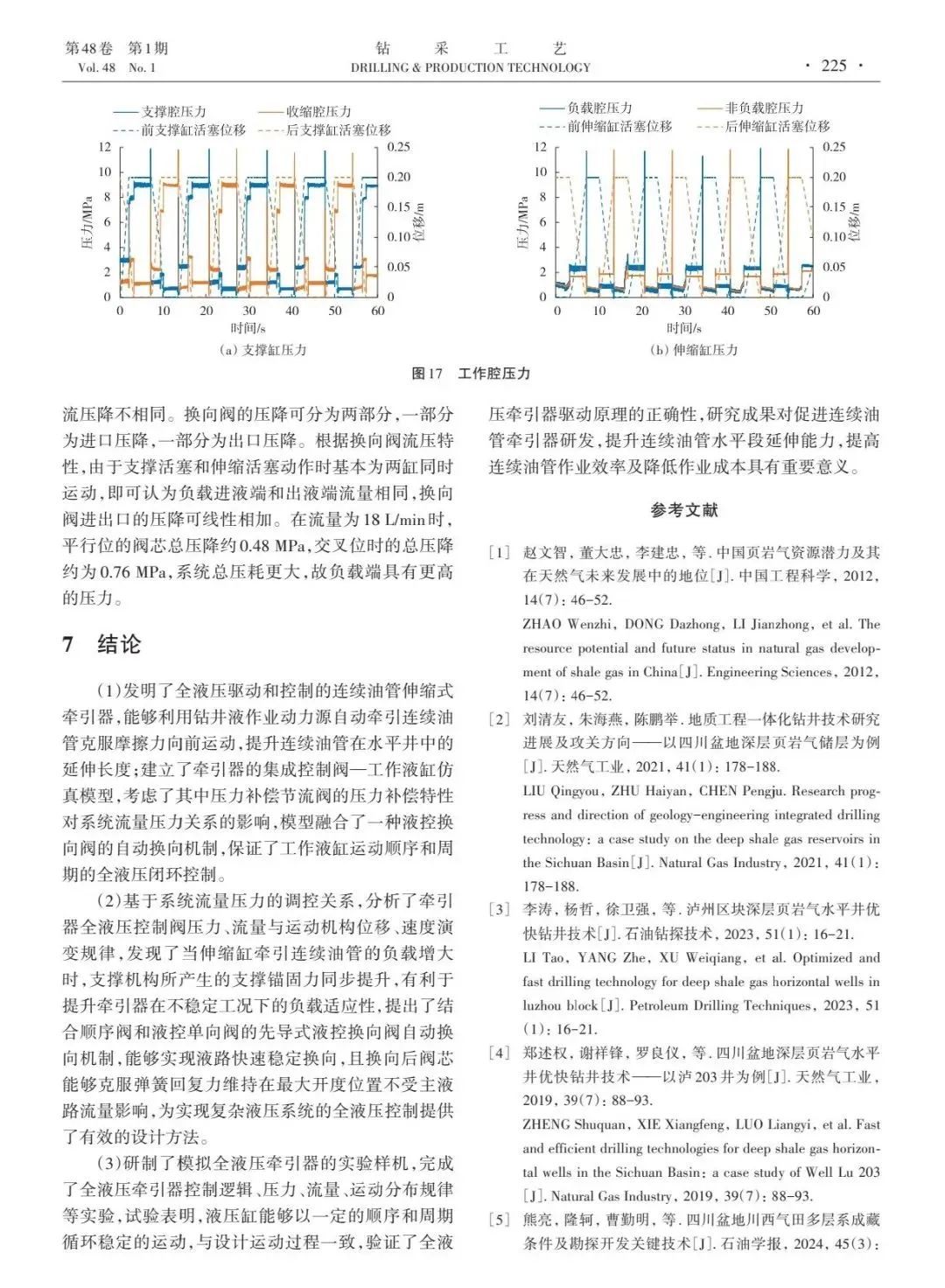
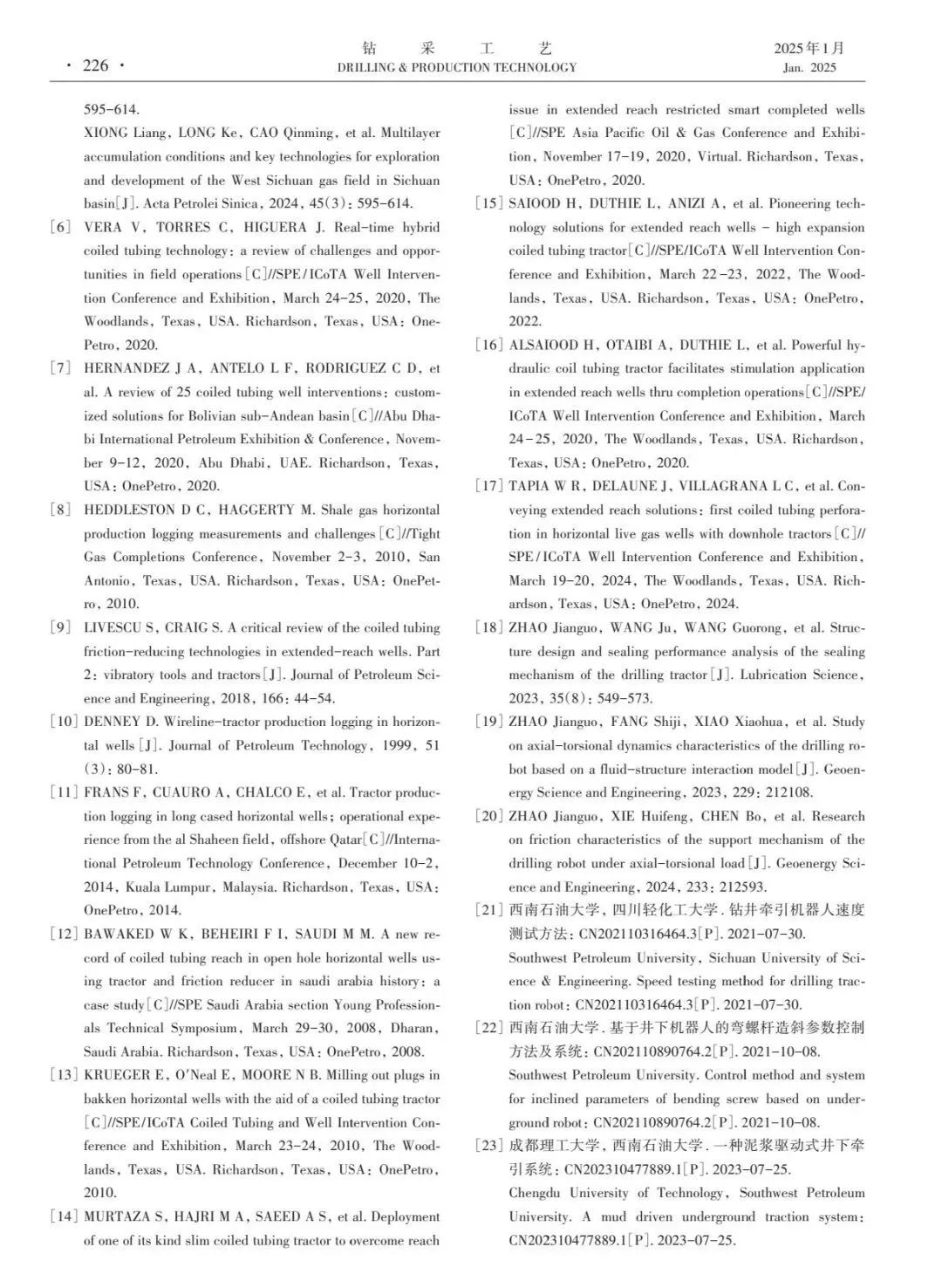
刘清友,赵建国,方世纪成都理工大学·油气藏地质及开发工程全国重点实验室摘要:因井深、水平段长、轨迹上翘、水垂比高、连续油管弯曲刚度小的影响,连续油管极易屈曲自锁,下入效率低、缩短连续油管服役井次,成本增加,严重时甚至无法下到井底。基于此提出全液压连续油管牵引器,利用牵引器拖拽连续油管,从根本上解决摩阻过大导致的屈曲锁死难题;发明了连续油管牵引器全液压控制和驱动系统,可实现远程启停控制和牵引力调节;建立了具有压力补偿特性的集成控制阀-牵引器运动的系统仿真模型;研究了牵引器全液压控制阀压力、流量与运动机构位移、速度演变规律,揭示了全液压牵引器运动顺序控制机理;提出了结合顺序阀和液控单向阀的先导式液控换向阀自动换向机制,可实现液路换向的自动闭环控制;研究发现,压力补偿型节流阀的压力补偿过程是通过流量调节阀体节流阻性的过程,通过数学描述该过程可反映系统压力与流量的调控关系;系统利用了顺序阀用于调控支撑缸与伸缩缸的运动顺序,支撑机构所产生的支撑锚固力将伴随伸缩缸的负载压力增大而同步提升,有利于提升牵引器在不稳定工况下的负载适应性;研制了模拟全液压牵引器的实验样机,完成了全液压牵引器控制逻辑、压力、流量、运动分布规律等实验,试验中模拟液缸的运动顺序与设计运动顺序完全一致,验证了全液压牵引器驱动原理的正确性。研究成果对促进连续油管牵引器研发,提升连续油管水平段延伸能力,提高连续油管作业效率及降低作业成本具有重要意义。
关键词:连续油管; 井下水力牵引器; 全液压系统; 水平井; 压力补偿节流阀

引用本文:刘清友,赵建国,方世纪. 全液压连续油管牵引器工作机理研究[J]. 钻采工艺,2025,48(1):216-227 LIU Qingyou, ZHAO Jianguo, FANG Shiji. Research on the Working Mechanism of Full Hydraulic Coiled Tubing Tractor[J]. Drilling and Production Technology, 2025, 48(1): 216-227
论文原载于第四届中国油气人工智能科技大会合作期刊《钻采工艺》2025年第1期,访问《钻采工艺》官网,下载全文。
为深化人工智能技术在油气勘探、开发、生产及管理全链条的创新应用,加速行业智能化升级与高质量发展,中国石油大学(北京)、中国石油天然气集团有限公司勘探开发人工智能技术研发中心、中国石化勘探开发数智技术重点实验室、油气资源与工程全国重点实验室、油气人工智能产学研创新联盟于2025年8月在北京联合举办“2025年第四届中国油气人工智能科技大会”。此次会议与合作期刊联合征稿,评选出的优秀论文将推荐至合作期刊上。
论文摘要截止时间:2025 年 6 月 30 日
论文全文截止时间:2025 年 9 月 1 日
联系人:马老师 15822801766
将论文摘要或全文发到邮箱paper@oilgasai.com
(注:论文摘要与参会回执表需同时投递)扫码添加会议联系人

扫码下载会议通知


立方石油
立方石油|传递油气价值信息!
526篇原创内容
公众号会议咨询丨马老师 联系电话15822801766(微信同)行研及合作咨询丨李老师 联系电话13581630352(微信同)
发布者:cubeoil,转转请注明出处:https://www.cubeoil.com/archives/102923